Chapter 15: Oscillatory Motion
15.0. Overview
The motion of certain objects is periodic, or repeating over a period of time. A violin string vibrating with some frequency, a planet orbiting around the sun, a pendulum swinging back and forth, a mass bouncing on the end of a spring, and a rubber ball bouncing on the floor, all exhibit periodic motion.
Some kinds of periodic motion are simple harmonic motion, and this type of motion is the focus of this section.
Let's get started!
15.1. Circular, periodic motion
Let's consider the motion of a point on a circle as a jumping-off point for our studies.
A rotating point
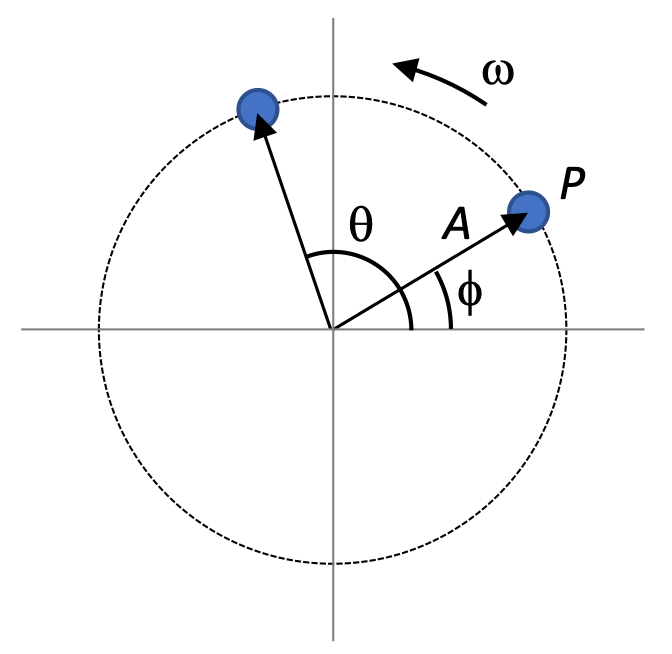
Point P starts at angular position ɸ, and travels in a counterclockwise direction around a circle with radius A, with a constant angular speed ω.
Some vocabulary
- A is the radius of the circle, and refers to the amplitude of our simple harmonic motion.
- T is the period, the time it takes for one complete circular revolution, or cycle of the simple harmonic motion.
- The initial angular position ɸ ("phi", pronounced "fee"), is the phase constant in simple harmonic motion.
- The angular speed ω is referred to as the angular frequency in simple harmonic motion.
The motion of a point around a circle is familiar, perhaps, and intimately related to the concept of simple harmonic motion. As we continue to look at that circle, let's focus in on the x-coordinate of the point P as it rotates.
The x-coordinate of a rotating point

Point P starts at angular position ɸ, and travels in a counterclockwise direction around a circle with radius A, with a constant angular speed ω. How can we determine the x-coordinate of the point P in terms of these quantities?
- In general, for any angle θ, the x-component of the radius A will be

- Because θ varies over time, we can use rotational kinematics to express θ in terms of some other quantities.

This equation,  , is fundamental to our further development, so make sure you understand exactly how we arrived at it.
, is fundamental to our further development, so make sure you understand exactly how we arrived at it.
As the point P rotates around the circle, you can imagine that the x-coordinate of that point is oscillating back and forth along the x-axis.

An animation of this oscillation is instructive. Here you can see an animated GIF captured from an online animation. Note that in this animation the vertical component y is being followed, and the sine function is being used to identify that y-component instead of the cosine tracking the x-component. The principles and the relationships are the same, however.
Simple harmonic motion refers to the linear motion over time of this rotationally-based motion. It's a fascinating mathematical fact that a number of natural systems exhibit just this kind of behavior, including a mass attached to the end of a spring, as shown in these horizontal and vertical animated GIFs.
15.2. Simple Harmonic Motion
Now that we've examined how circular motion can be described, and how we can track the x-component of a rotating point over time, let's explore the concept of simple harmonic motion in more detail.
15.2.1. Fundamental definitions
There are some important quantities associated with simple harmonic motion.
Definition of Simple Harmonic Motion
By definition, a particle traveling on the x-axis exhibits simple harmonic motion when its position varies according to this relationship:
Position x is a function of time t, and repeats when ωt increases by 2π.
Note that we're describing the linear motion of a particle in terms of rotational values like ω and θ. That's okay!
There are two related quantities that we can easily determine using the quantities we've already described.
Definition of Period T
The time for a a single rotation, or for a single "cycle" for a particle moving back and forth in SHM, is the period, T, which has the SI units seconds (per cycle).

A related quantity is the frequency f of the system.
Definition of frequency f
The frequency of an oscillator is the inverse of the period, ie. the number of cycles per second.

The SI unit for frequency is the "Hertz," abbreviate Hz. On older electronic equipment you may see the unit "cps" listed, which stands for "cycles per second."
15.2.2. Velocity and Acceleration of an oscillator
As we've said, the fundamental relationship for the back-and-forth motion of a particle oscillating along the x-axis is:
Let's expand on the relationship to identify the velocity and acceleration of the particle as it accelerates.
Velocity of a particle with SHM
We can determine the velocity of a particle by taking the time-derivative of its x function:

The maximum velocity of this particle occurs when the sin function has a value of 1:

One more derivation. What is the acceleration of a simple harmonic oscillator over time?
Acceleration of a particle with SHM
We can determine the acceleration of a particle by taking the time-derivative of its v function:

The maximum acceleration of this particle occurs when the cos function has a value of 1:

Note that in the derivation for acceleration above we can simplify the result by substituting in the value for displacement x.

This is an important result!
Acceleration of an SHM
This relationship,  , is an important one that will be key to the work we do here below.
, is an important one that will be key to the work we do here below.
It states that the acceleration of a simple harmonic oscillator is linearly proportional to the displacement x, and in the opposite direction.
The ω2 term will vary, depending on the the system.
15.2.3. How do we know if we're seeing SHM?
As mentioned at the beginning of this chapter, there are a number of different kinds of motion that repeat over time. How can we identify which ones are actually Simple Harmonic Motion, and thus can be analyzed using the mathematics we've developed to this point?
As implied above, the equation is an indication of SHM. If we have a system in which the acceleration of the system varies linearly with the negative of displacement, our system must be exhibiting simple harmonic motion. The value of ω depends on the system.
Let's see how we can do that analysis.
15.3. Oscillators
We'll look at three different oscillators here:
- a mass attached to an ideal spring
- a mass attached to the end of a string, ie. a pendulum
- a "physical" pendulum, in which a mass with some dimensions swings back and forth
15.3.1. Mass-Spring System
Do mass-spring systems exhibit simple harmonic motion? Let's see.
Do mass-springs exhibit SHM?
Using the relationship , determine whether a mass-spring system exhibits SHM.
- Assuming a Hooke's Law spring, we know that the force supplied by the spring varies with negative of the displacement.

- Using Newton's 2nd Law of motion:

- The form of this equation is a = -kx, where k is a constant. This indicates that the mass-spring system exhibits SHM, where

Once we've determined that  we can use all of the Simple Harmonic Motion equations that include ω.
we can use all of the Simple Harmonic Motion equations that include ω.
Mass-Spring oscillators and SHM
Because the acceleration of a mass on an ideal spring varies linearly as the negative of the displacement:

Therefore, substituting into the SHM equations:

We've taken a look at how forces drive a mass-spring oscillator. We can also use an energy-based approach to examine its behavior.
15.3.1.1. Energy in a Mass-Spring System
One more time, let's take a look at this horizontal mass-spring oscillator.
Kinetic and Potential Energy

A mass is attached to a spring and oscillates back and forth on a horizontal, frictionless surface. The equilibrium position, at x = 0 (x0), is where the spring is neither compressed nor extended. At the far left of its range, it momentarily comes to stop at position x = +A, and at the right, it momentarily stops at position x = -A. Between these two positions, it has a maximum speed v0 as it passes the equilibrium position.
- What is the maximum elastic potential energy in the system?
- What is the maximum kinetic energy in the system?
- For a given displacement x relative to x = 0, what is the total mechanical energy of the system?
- We can determine the maximum elastic potential energy by using x = +/- A, where the spring is stretched or compressed to its maximum displacement.

- The maximum kinetic energy occurs at the midpoint, where the block is traveling fastest.

- The total mechanical energy of the system is the sum of the elastic potential and kinetic energies.

SHM Concepts
For a mass oscillating at the end of a spring:
- Where is the speed of the mass at a maximum?
- Where is the speed of the mass at a minimum?
- Where does the acceleration of the mass have the greatest magnitude?
- Where is the acceleration of the mass zero?
- The mass is traveling fastest as it moves through the equilibrium position.
- The mass has an instantaneous speed of zero at either end of its range of travel, ie. at +A and -A.
- The acceleration of the mass is greatest where the force from the spring is greatest: at the end points, where the spring is maximally stretched or compressed.
- The acceleration of the mass is 0 where the net force on it is zero. In this case, that's at the equilibrium position, at x = 0.
Kinetic and Potential Energy
A 5.00-kg mass is connected to a light spring with k = 20 N/m, and oscillating on a horizontal frictionless surface.
- Calculate total energy of the system and speed of mass at x0 if Amplitude is 3.00 cm.
- Find K and U when x = 2.00 cm.
- What is the velocity of the mass at x = 2.00 cm?
- To get the total energy, we can use its potential energy at maximum displacement where there is no kinetic energy:
 Then use that energy as the maximum kinetic energy (when there is potential energy) as the mass passes the equilibrium position:
Then use that energy as the maximum kinetic energy (when there is potential energy) as the mass passes the equilibrium position:

- We've already determined the total energy of the system. With a given displacement we can get potential energy; the remaining energy will be kinetic.

- Now that we know K, solving for v is straightforward:

15.3.2. Simple Pendulum

A "simple pendulum" consists of a mass (a "bob") at the end of a string of length L, swinging back and forth due to the effect of gravity.
Does a simple pendulum exhibit simple harmonic motion?
Superficially it certainly does. It has its greatest speed at the middle of its range of motion, and it momentarily comes to a stop at either end of that range.
To identify whether or not it represents SHM, we'll need to answer the question, does a = - ω2x?
Does a Pendulum exhibit Simple Harmonic Motion?
Perform a free-body analysis of a pendulum bob, and use Newton's Second Law of Motion to identify whether or not the pendulum exhibits SHM.
Solution

A free-body diagram of the bob is shown here, with two forces acting on it: the force of gravity, and the force of tension from the pendulum string. Because we're seeing radial acceleration along the line of the string and tangential acceleration along the arc of the pendulum's path, we're going to tilt our axes for this analysis. This, in turn, means that we need to split the force of gravity into components as shown.
The force that causes the pendulum to accelerate toward its equilibrium position is that tangential force, mg sin θ. Let's do our Newton's law analysis using that force.

This is a bit awkward: we've got a rotational measurement θ on the right and a linear measurement a on the left. Let's convert everything to rotational measurements for our rotational situation:

We've already established that the if (where a is the second-derivative of x), we have Simple Harmonic Motion.
Looking at the equation, it's close. The second derivative of θ is linearly proportional to the negative of sin θ, which is not θ. So technically speaking, pendulums don't follow the rules for Simple Harmonic Motion.
And yet...
For small angles of θ less than 15 degrees or so, we say that simple pendulums do behave as Simple Harmonic oscillators.
If we graph θ and sin θ on the same graph, can you see why we accept this?

Period and Frequency for a Pendulum
We've determined that Simple Harmonic Motion occurs when the acceleration (the second derivative of x) varies linearly as the negative of x.

We've just seen that a force-based analysis of the acceleration of a pendulum is described with this equation, where g and L are constants.

If we accept the small-angle approximation, we can then identify ω for a pendulum:

Thus:

15.3.3. Physical Pendulum
One type of physical pendulum involves a solid object—a long, thin rod, a meter stick, or some other object with a distribution of of mass—that oscillates under the influence of gravity.
To analyze this situation we have to take into account the fact that the force of gravity which is driving the system is acting throughout the length of the system. We can do this by considering the torque on the rod.
Oscillation of a physical pendulum

For an object with a mass m and a moment of inertia I relative to its axis of rotation:

Applying our Simple Harmonic Motion analysis to this result, we get

Let's apply what we've learned here to a problem.
Oscillation of a Physics Pendulum
A pendulum is made of a 1.0 kg meter stick with a 2.0 kg blob of clay stuck on it at the 75 cm mark.
- Calculate the moment of inertia I for this pendulum.
- Find the location of the pendulum's center of mass.
- Calculate the period of the pendulum's oscillation.
- 1.46 kg m2
- 0.67 m
- ?!